
JOHN DRISCOLL: PROJECT DETAILS
PROJECT DESCRIPTION
HISTORY
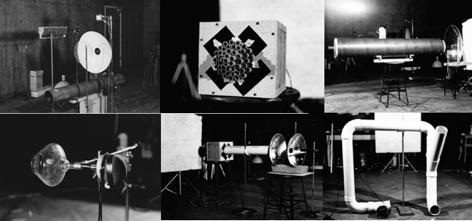
During a research residency with Composers Inside Electronics at Media Study Buffalo I became intrigued with the idea of physically moving sound vs. electronically panning sound in space. The group designed a number of different focused loudspeaker configurations, but never developed a group work out of the research. (see Fig. 1)
Subsequently I developed a series of rotating focused speakers using various horns and robotic mechanisms. This resulted in a number of works with four unique rotating speakers for both music performance and as music/stage sets for dance. (see Fig. 2)
Fig. 2 - Rotating Loudspeakers
Since that time I have wanted to revisit and update the potentials in physically moving sound. Due to current advances in technology (inexpensive servo motors, motor drives, arduino micro-controllers, and ultrasonic speakers) it is now time to create a new work to exploit these developments.
PROJECT
In the last two years I have made new works utilizing robotic ultrasonic instruments which has led to a familiarity with arduino controlled servo motor systems utilizing Max software developed by my associate Phil Edelstein. With the advent of a number of small lightweight ultrasonic speakers it will be possible to utilize a number (3-4) dual-axis servo systems to aim these ultrasonic speakers. Using the base mechanism from an earlier rotating speaker (see work sample 2) I can also move a larger wider bandwidth ultrasonic speaker with approximately 240o of motion under both automated and manual control.
My experience with the earlier focused speakers and rotating speakers demonstrated that sound materials have to be specifically designed to take advantage of the physical properties of moving speakers.
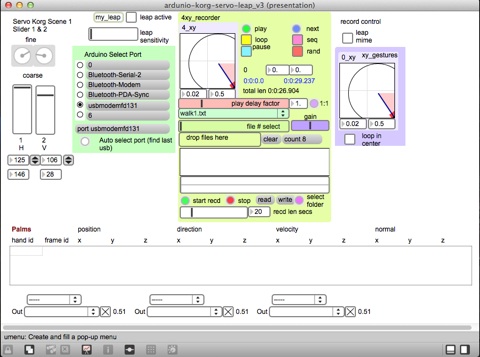
During my development of my ultrasonic instruments I have created prototype motor control software using the Arduino IDE environment and Max/MSP interfaced with both Wii Nunchucks and Leap controllers with the assistance of Phil Edelstein. This software can be refined and re-purposed for use in controlling the smaller servo systems (see fig. 3). It currently controls one dual axis servo system with the ability for either manual control of speed and direction, or it can record movement patterns for playback. It lacks the ability to write a sequence of recorded patterns that will need to be developed as part of the new work. (see screen shot of control software)
Fig. 2 - Max/MSP motor control software (dual axis)
TASKS
The specific tasks to be accomplished are:
Purchases
A. One (wide bandwidth ultrasonic speaker) HSS H450
B. (3-4) soundlaser parametric speakers
C. (3) X-Y servo systems (heavy duty servos)
D. (3) Arduino Uno’s
E. Appropriate mounting brackets for speakers
F. Necessary hardware/cables/chassis
2)Technical
A. Refine motor control software for stronger recording capabilities
and gesture sequencing
B. Create parabolic mechanical reflectors (4-5) (Long Island)
C. Develop software for live control (Max/MSP) - Harvestworks
D. Assembly of existing (3-4) parabolic reflectors (L.I.)
E. Recording and tuning of sound source materials (Harvestworks)
F. Testing of systems (control/performance)
G. Retrofitting of rotating loudspeaker for ultrasonic speaker (L.I.)
H. Equipment
- 12 channel Niles amplifier
- MacBook Pro
- (5) Arduino Uno (w/servo shield)
- Motor Drive Amplifier and power supply (dual axis)
- Leap controller
- (2) Korg Nano Kontrol Midi Controllers
- (4) X-Y servo systems
- (3) soundlaser Parametric Ultrasonic Speakers
- HSS H450 Ultrasonic Speaker
- Tascam US1800 (8 ch input interface)
- ESI Gigaport (8 ch output interface)
PERFORMANCE PREPARATION
A. Programming of speaker movements
B. Rehearsal of performance sequence
C. Run-through with Binaural recording and video documentation
D. Project documentation
PERFORMANCE PLANS
Once the work is developed to a prototype stage I will pursue performance venues including:
• Norte Maar – Jason Andrews (sites in Brooklyn and NYC)
• Roulette – Jim Staley (Brooklyn)
• Experimental Intermedia Fdn. – Phill Niblock (NYC)
• Issue Project Room – Lawrence Kumpf (Brooklyn)
• Bard College – Richard Teitlebaum
• RPI – Pauline Oliveros (Troy, NY)
• Electro-Music – Howard Moscovitz (Huguenot, New York)
PROJECT SKILLS
The skills needed from Harvestworks staff includes:
A. Max/MSP programming – this will entail the modification of
existing motor control software and development of new
performance control software
B. Assistance in set-up and testing of ultrasonic speaker control and
performance system (Harvestworks)
C. Assistance in documentation (binaural audio recording and video
recording) - possibly large space/church on Governors Island or
NYC/Brooklyn
SCHEDULE
A. Motor and Performance Control Software (revisions/dev.)
(intermittent) - Harvestworks/Long Island
B. Recording of Sound Materials - (4 days) - Harvestworks
C. Mechanical Testing of systems - (2-3 days) - Harvestworks
D. Retrofitting Rotating Loudspeaker - (3 days) - Long Island
E. Creating Speaker Movement Sequences - (2 days) - Harvestworks
F. Rehearsal / Reprogramming Speaker Movement (2 days) site specific
G. Recordings (1 day) - site specific
H. Documentation - 3 days (Long Island)
(Note: appropriate space for rehearsal/recordings will be determined in conjunction with Harvestworks.)
Personal Data | Project Summary | Work Sample 1 | Work Sample 2 | Work Sample 3