
JOHN DRISCOLL: WORK SAMPLE 2
This work sample illustrates the motion characteristics of a small robotic servo system for controlling the speed and direction of highly focused ultrasonic speakers. This sample is a visual demonstration of the ability to aim a focused speaker with accuracy and use of either manual or automated control of the movement patterns.
There will be three robotic systems like the one illustrated below for moving focused sound during the performance. A fourth larger system for a larger ultrasonic speaker is illustrated in Work Sample 3.
Figure 1. Robotic Servo System Demonstration (1min 11 sec.)
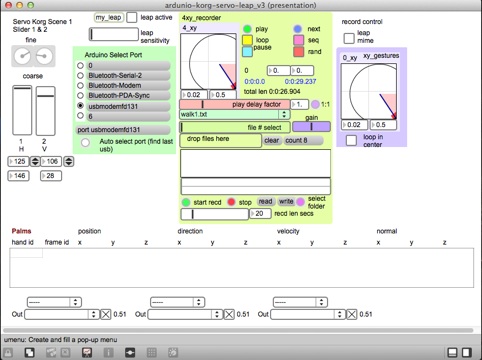
Figure 2. Max/MSP software for manual/automated motor control
(dual axis)
Personal Data | Project Summary | Project Details | Work Sample 1 | Work Sample 3